
技術說明系列 1 - 編碼器原理與比較
在運動控制 (motion control) 中,受控件的位置回授 (position feedback) 極為重要,此物理量資訊是達到位置環 (position loop) 閉迴路 (closed-loop) 控制的必要條件。編碼器 (encoder) 正是為此而生,不論是提供線性移動或旋轉移動的位置資訊,此資訊可以進一步得到速度、加速度的資訊,在各種工業、科學和消費設備中都有廣泛的應用。
而以下比較5種不同運作原理的旋轉編碼器 (Rotary Encoder) ,而線性編碼器 (Linear Encoder) 的原理也大致相同。
- 增量型編碼器 (Incremental Encoder)
- 弦波編碼器 (Sine Encoder)
- 解角器 (Resolver)
- 磁性編碼器 (Magnetic Encoder)
- 電子式編碼器 (Netzer Electric Encoder™)
1. 增量型編碼器 (Incremental Encoder)
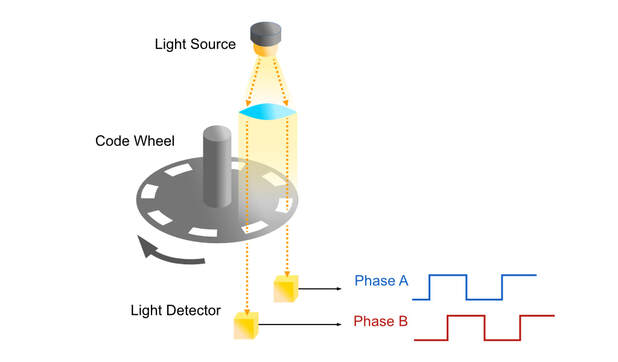
泛指常見的光學式增量型編碼器,也被稱為 TTL 編碼器 (Transistor-Transistor Logic),自 1960 年代初以來就被廣泛使用。大部分的編碼器都是利用此原理,藉由旋轉時光源通過光柵的穿透與遮蔽,輸出高低電壓位的脈衝列 (Pulse Train) 電子訊號,進而解析為角度資訊。因此編碼器須由光源、光感測器和一個交替透明和不透明部分的旋轉刻度 (光柵) 組成,如下圖。而輸出兩組相位差90º的脈衝列A與B的用意在於,藉由偵測A或B先從低電位變為高電位,我們可以得知此時為正轉或反轉,這是單一脈衝列無法達到的。儘管精度相當良好,但編碼器中的光學元件使得此類編碼器在受到振動、衝擊與高溫時容易失效。
泛指常見的光學式增量型編碼器,也被稱為 TTL 編碼器 (Transistor-Transistor Logic),自 1960 年代初以來就被廣泛使用。大部分的編碼器都是利用此原理,藉由旋轉時光源通過光柵的穿透與遮蔽,輸出高低電壓位的脈衝列 (Pulse Train) 電子訊號,進而解析為角度資訊。因此編碼器須由光源、光感測器和一個交替透明和不透明部分的旋轉刻度 (光柵) 組成,如下圖。而輸出兩組相位差90º的脈衝列A與B的用意在於,藉由偵測A或B先從低電位變為高電位,我們可以得知此時為正轉或反轉,這是單一脈衝列無法達到的。儘管精度相當良好,但編碼器中的光學元件使得此類編碼器在受到振動、衝擊與高溫時容易失效。
2. 弦波編碼器 (Sine Encoder)
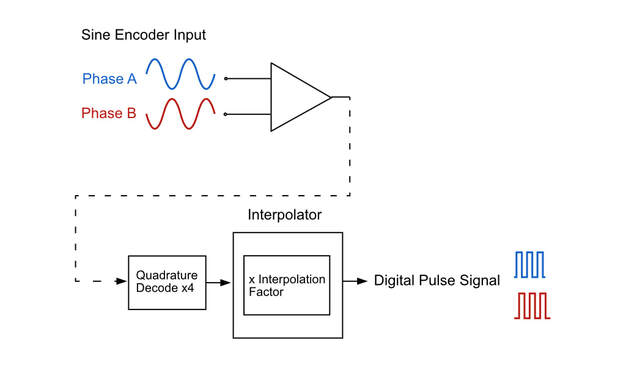
上述增量型編碼器,光柵的數量越高則解析度越高,但光柵數量終究有其物理極限,因此 Sine Encoder 便是運用相同運作原理,但將輸出脈衝列訊號改為輸出類比的弦波訊號。類比的弦波訊號需要再經由電路轉換為數位訊號。由於弦波訊號具有振幅和相位,我們可以將每個完整的弦波轉換為一個脈衝列。這將一個弦波轉換為多個脈衝的過程被稱為插值 (interpolation)。插值的解析度可以非常高,取決於電子電路的性能。由於與增量型編碼器一樣有光學元件,因此Sine Encoder 在受到振動、衝擊與高溫時容易失效。
上述增量型編碼器,光柵的數量越高則解析度越高,但光柵數量終究有其物理極限,因此 Sine Encoder 便是運用相同運作原理,但將輸出脈衝列訊號改為輸出類比的弦波訊號。類比的弦波訊號需要再經由電路轉換為數位訊號。由於弦波訊號具有振幅和相位,我們可以將每個完整的弦波轉換為一個脈衝列。這將一個弦波轉換為多個脈衝的過程被稱為插值 (interpolation)。插值的解析度可以非常高,取決於電子電路的性能。由於與增量型編碼器一樣有光學元件,因此Sine Encoder 在受到振動、衝擊與高溫時容易失效。
3. 解角器 (Resolver)
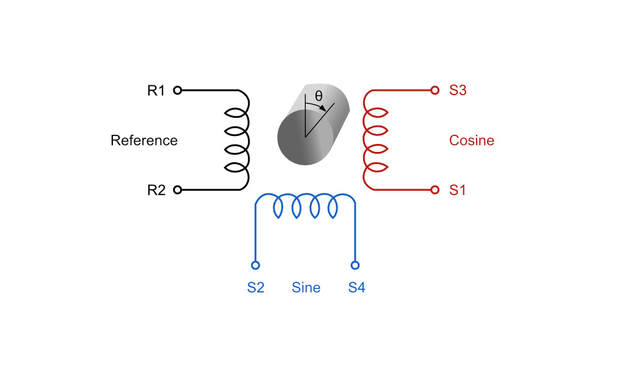
解角器是一種非常堅固的類比設備。解角器的原理與變壓器相同,它有一個主線圈,施加弦波做為參考信號,和兩個90度相位差的次級線圈,提供正弦和餘弦的輸出信號。參考信號、正弦和餘弦位於解角器的定子上。解角器的轉子將參考信號耦合並傳輸到次級線圈輸出。隨著馬達軸的轉動,轉子的位置以及正弦和餘弦輸出的振幅和相位都會改變。在360º中的每一個點上,正弦和餘弦的振幅和相位關係都是獨特的,因此解角器是絕對式的。輸出的正弦和餘弦訊號都常由接收端的解角數位轉換器 (RDC, Resolverto-Digital Converter) 轉換為數位訊號。與其他回授設備不同,解角器的構造非常簡單,只有外殼和線圈,該結構使其具有耐高溫、衝擊與振動的特性。並且由於沒有任何接觸零件,解角器不會隨著時間而磨損。
解角器是一種非常堅固的類比設備。解角器的原理與變壓器相同,它有一個主線圈,施加弦波做為參考信號,和兩個90度相位差的次級線圈,提供正弦和餘弦的輸出信號。參考信號、正弦和餘弦位於解角器的定子上。解角器的轉子將參考信號耦合並傳輸到次級線圈輸出。隨著馬達軸的轉動,轉子的位置以及正弦和餘弦輸出的振幅和相位都會改變。在360º中的每一個點上,正弦和餘弦的振幅和相位關係都是獨特的,因此解角器是絕對式的。輸出的正弦和餘弦訊號都常由接收端的解角數位轉換器 (RDC, Resolverto-Digital Converter) 轉換為數位訊號。與其他回授設備不同,解角器的構造非常簡單,只有外殼和線圈,該結構使其具有耐高溫、衝擊與振動的特性。並且由於沒有任何接觸零件,解角器不會隨著時間而磨損。
4. 磁性編碼器 (Magnetic Encoder)
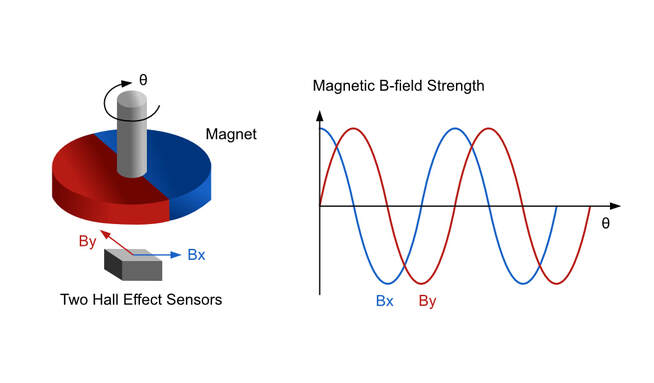
磁性編碼器運作原理為透過偵測磁場變化得到位置訊息,再轉換成為電子訊號輸出。最基本的磁編碼器由磁性感測器與永久磁鐵組成。 由霍爾元件 (Hall Effect Sensor) 組成的磁感測器安裝在固定端,永久磁鐵則安裝旋轉軸的末端。 當永久磁鐵旋轉時,磁感測器中配置的兩組互相垂直的霍爾元件將分別感測到 x 方向與 y 方向的磁場變化,經由電路解析後可得到絕對式的位置資訊。磁性編碼器的耐候性較光學式編碼器好,但在要求高精度、高解析度的場景中較難達到要求。
磁性編碼器運作原理為透過偵測磁場變化得到位置訊息,再轉換成為電子訊號輸出。最基本的磁編碼器由磁性感測器與永久磁鐵組成。 由霍爾元件 (Hall Effect Sensor) 組成的磁感測器安裝在固定端,永久磁鐵則安裝旋轉軸的末端。 當永久磁鐵旋轉時,磁感測器中配置的兩組互相垂直的霍爾元件將分別感測到 x 方向與 y 方向的磁場變化,經由電路解析後可得到絕對式的位置資訊。磁性編碼器的耐候性較光學式編碼器好,但在要求高精度、高解析度的場景中較難達到要求。
5. 電子式編碼器 (Netzer Electric Encoder™)
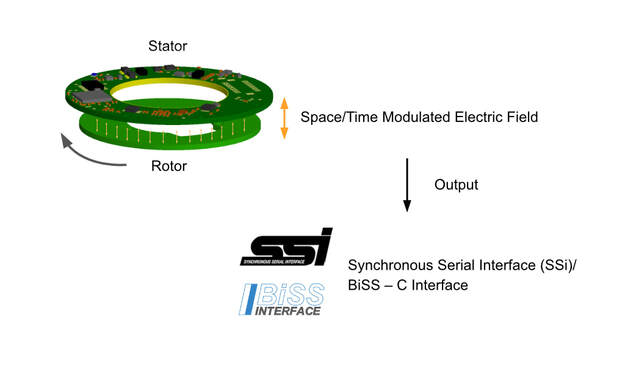
由 Netzer Precision Position Sensors 開發的專利 Netzer Electric Encoder™ 電子式編碼器,利用無接觸的定子與轉子之間隨著位移而有對應的時空調諧電場 (Space/Time Modulated Electric Field) 得到絕對式角度,可以得到接近頂尖光學式編碼器的精度與解析度,卻同時保有超高的奈衝擊、震動、溫度與電磁波干擾的軍規等級特性,並且中空軸與輕薄的特性使客戶非常容易整合於緊湊的機構設計中。各方面的高性能以及針對符合 ISO-13485 醫療器材的設計,使 Netzer Electric Encoder™ 電子式編碼器不僅應用在自動化等工業中,更在醫療技術、航太與國防領域深獲信任。
由 Netzer Precision Position Sensors 開發的專利 Netzer Electric Encoder™ 電子式編碼器,利用無接觸的定子與轉子之間隨著位移而有對應的時空調諧電場 (Space/Time Modulated Electric Field) 得到絕對式角度,可以得到接近頂尖光學式編碼器的精度與解析度,卻同時保有超高的奈衝擊、震動、溫度與電磁波干擾的軍規等級特性,並且中空軸與輕薄的特性使客戶非常容易整合於緊湊的機構設計中。各方面的高性能以及針對符合 ISO-13485 醫療器材的設計,使 Netzer Electric Encoder™ 電子式編碼器不僅應用在自動化等工業中,更在醫療技術、航太與國防領域深獲信任。
總結:編碼器如何選擇 - 比較表
光學式編碼器 |
解角器 |
磁性編碼器 |
電子式編碼器 |
|
精度/解析度 |
中-極高 |
低 |
低 |
高 |
耐候性(溫度/振動/衝擊) |
差 |
極好 |
好 |
極好 |
抗電磁波 |
好 |
極好 |
差 |
極好 |
尺寸/重量 |
中 |
大 |
小 |
極小 |